Humanoid

Complete immersion and precise control of digits and arms
We're building the next generation of humanoid robotics interactions! Our ambitious goal is to implement fine control over a robotic hand and arm from a VR headset wirelessly, with complete immersion through cameras and head movement tracking.
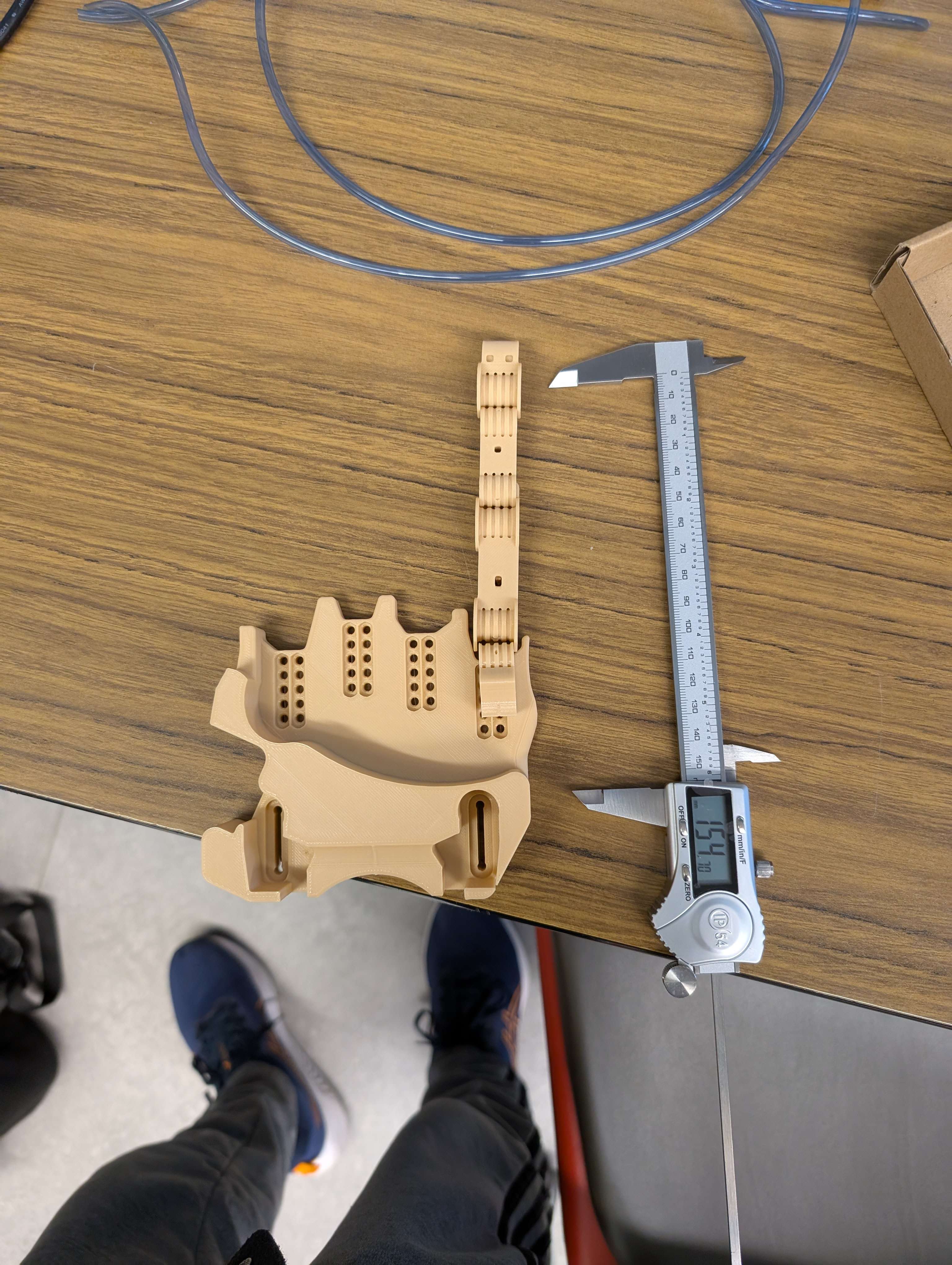
Mechanical Design: Designing the fingers, forearm, arm, and stand with high dexterity capabilities for precise manipulation tasks.
Electrical Design: Developing custom PCBs, power systems, and signal processing for seamless communication between components.
Firmware: Writing custom firmware for the PCBs, motors, and sensors to enable real-time control and feedback.
VR Software: Gathering hand data using the Meta SDK and transmitting commands to the robot via WebSocket for instantaneous response.
The use cases are endless: human remote control of robots for dangerous situations, interactions with heavy equipment, physically difficult tasks, and enhanced mobility for people with physical disabilities. We're creating a tele-operable humanoid bot that bridges the gap between human intention and robotic execution.
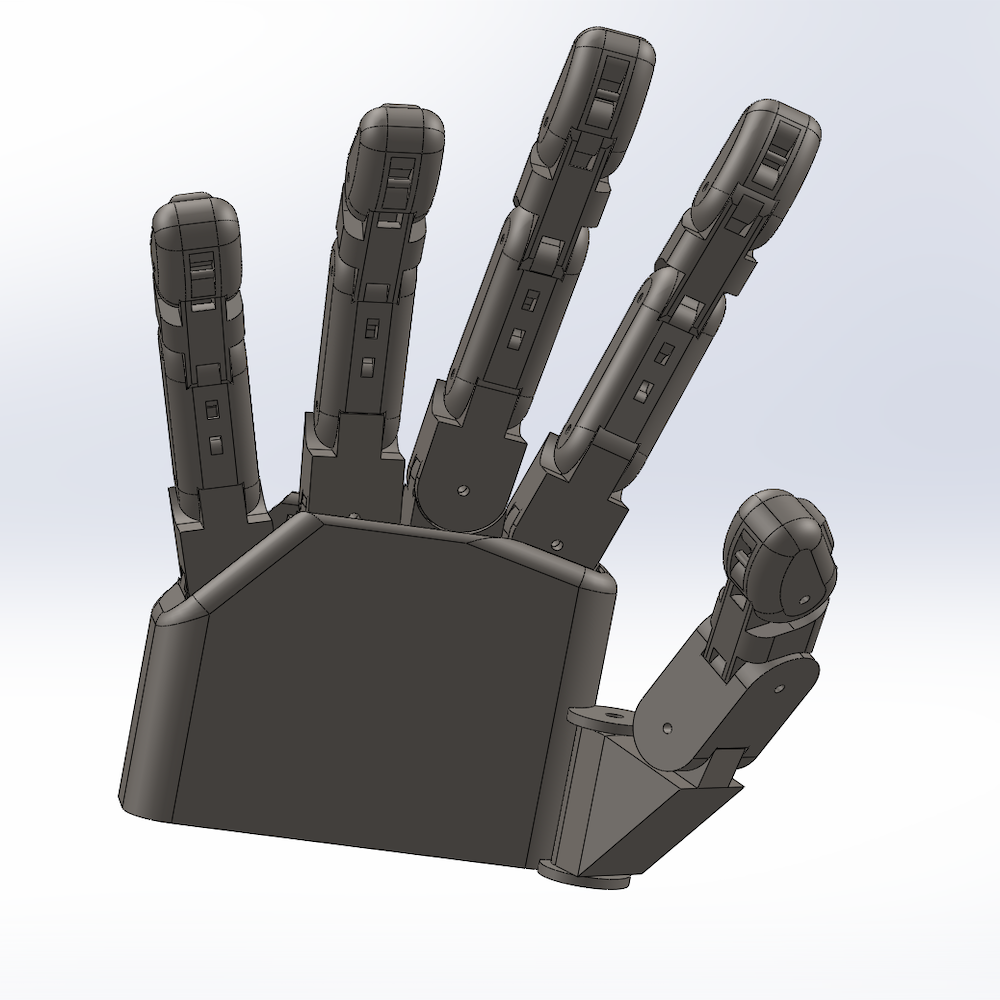
Robotic Hand Development
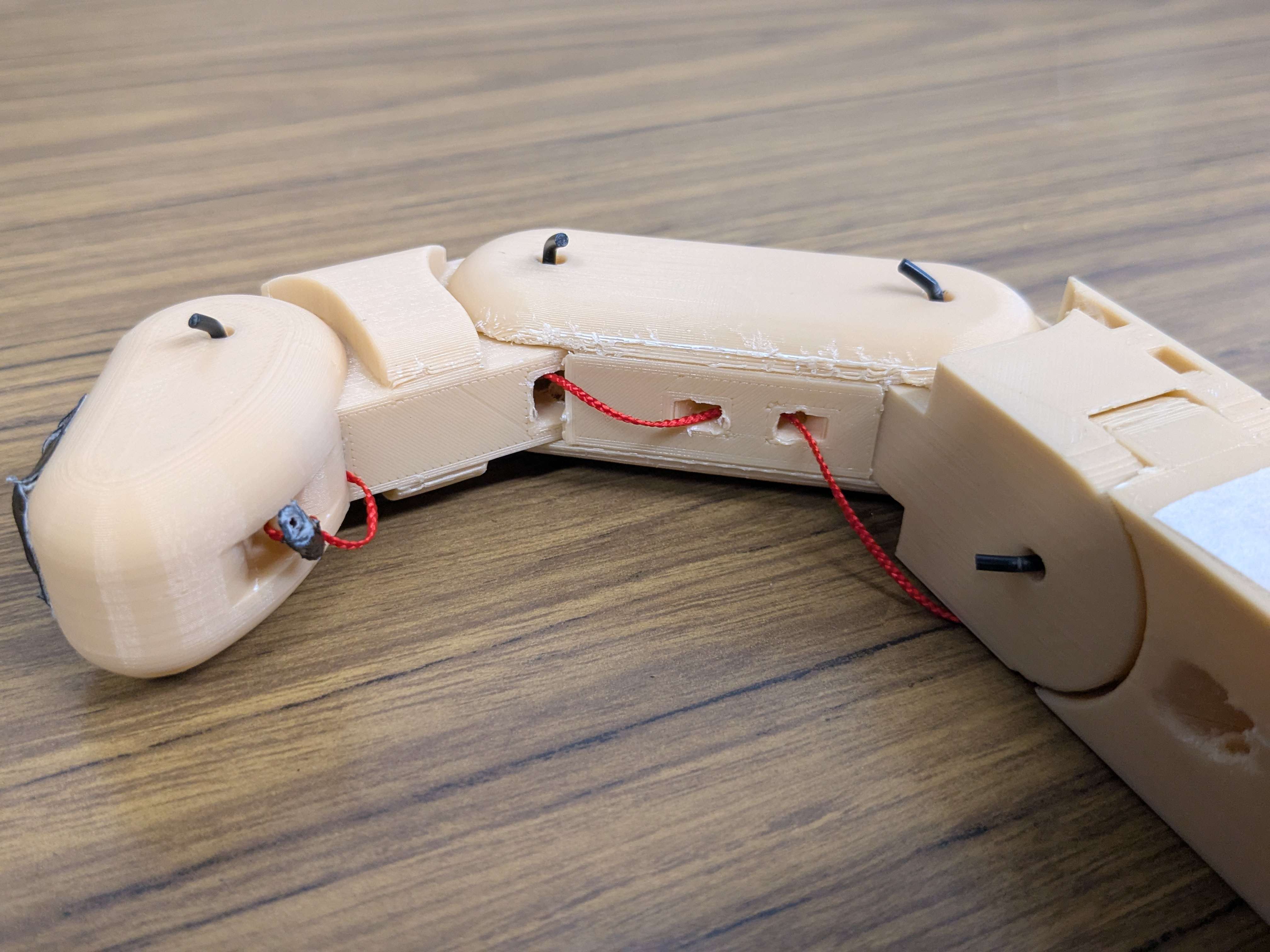
Our robotic hand features articulated fingers with tendon-driven actuation systems, allowing for precise control and natural movement patterns. Each finger is equipped with multiple degrees of freedom, enabling complex grasping and manipulation tasks.
The hand can achieve various poses from fully open configurations to precise pinch grips and gesture recognition. The tendon system provides the mechanical advantage needed for strong grips while maintaining the flexibility for delicate operations, making it ideal for telepresence applications.
Vision & Implementation
This project combines VR technology with robotics to create a real life avatar, in the form of a humanoid robot. The applications are endless. These robots can be deployed in dangerous scenarios, such as war zones, to perform tasks without risking human lives. We are starting of with the goal of playing the violin with the robot through tele-operation. Eventually, we aim to incorporate autonomy into the humanoid, similar to Tesla's Optimus project.